


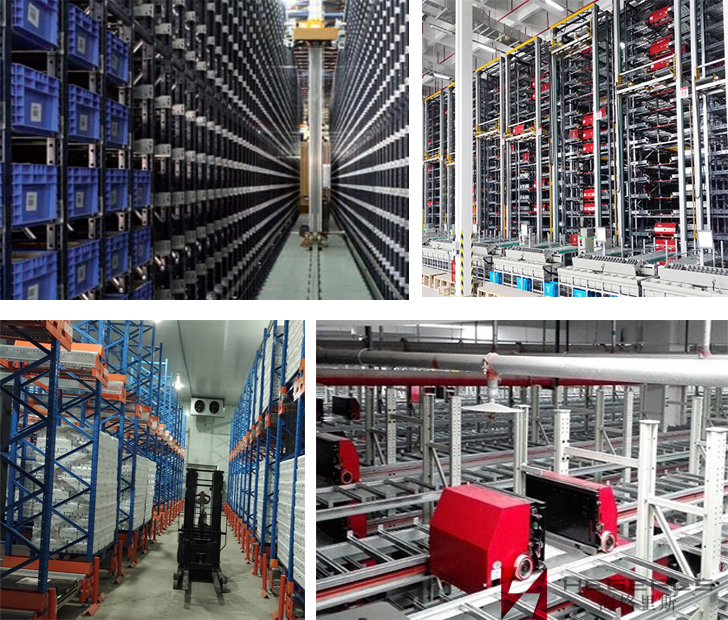
ໃນຊຸມປີມໍ່ໆມານີ້, ດ້ວຍຄວາມນິຍົມຢ່າງຕໍ່ເນື່ອງຂອງອິນເຕີເນັດ, ການຄ້າ e-commerce ໄດ້ພັດທະນາຢ່າງໄວວາ. ສິນຄ້າຄໍາສັ່ງຂອງລູກຄ້າສະແດງໃຫ້ເຫັນລັກສະນະຂອງແນວພັນ, ຈໍານວນບໍ່ຫຼາຍປານໃດແລະໄລຍະເວລາການຈັດສົ່ງສັ້ນ, ເຊິ່ງເຮັດໃຫ້ຄວາມຫນາແຫນ້ນຂອງການເກັບຮັກສາຂອງຊັ້ນວາງໃນສູນກະຈາຍການຂົນສົ່ງຂອງຜູ້ສະຫນອງຢ່າງຕໍ່ເນື່ອງປັບປຸງ. ຄວາມຖີ່ຂອງວັດສະດຸເຂົ້າແລະອອກຈາກສາງແມ່ນເພີ່ມຂຶ້ນ. ຈໍານວນຂອງພາກສ່ວນຂະຫນາດນ້ອຍແມ່ນເພີ່ມຂຶ້ນແຕ່ມື້. ສູນກະຈາຍສິນຄ້າ logistics ຫຼາຍກວ່າແລະຫຼາຍໄດ້ນໍາໃຊ້ລົດຮັບສົ່ງສິນຄ້າກັບລະບົບການເລືອກເອົາປະຊາຊົນ.
HEGERLS (Hebei Walker Metal Products Co., Ltd.
ສ້ອມ telescopic Clamping ໄດ້ຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນອຸປະກອນການເກັບຮັກສາອັດຕະໂນມັດເຊັ່ນ: stereo warehouse shuttle ລົດຫຼາຍຊັ້ນ, shelf bins AGV, RGV, ແລະ mini load. ນ້ໍາຫນັກສູງສຸດຂອງກ່ອງວັດສະດຸທີ່ຖືໂດຍ HEGERLS ສາມາດບັນລຸ 50Kg. ຄວາມກວ້າງຂອງການຍຶດຂອງແຂນສ້ອມສາມາດປັບໄດ້ຕາມຄວາມຕ້ອງການພາຍໃນ 200 ~ 600 ມມ. ການເດີນທາງເລືອກສູງສຸດແມ່ນ 840mm. ຄວາມໄວການປະຕິບັດສູງສຸດຂອງສ້ອມ telescopic ແມ່ນ 1.5m/s, ແລະຄວາມເລັ່ງແມ່ນ 1.2m/s ². ສິ່ງລົບກວນການປະຕິບັດການໄດ້ຖືກຄວບຄຸມພາຍໃນ 75dB, ຊຶ່ງສາມາດຕອບສະຫນອງຄວາມຕ້ອງການຂອງ racks ຂະຫຍາຍດຽວແລະສອງສ່ວນຫຼາຍ. HEGERLS ຍັງສາມາດປັບແຕ່ງບ່ອນຈອດລົດ stereoscopic ລົດຮັບສົ່ງຫຼາຍຊັ້ນຂອງກ່ອງສ້ອມ telescopic ຈັບມືຕາມຄວາມຕ້ອງການສະເພາະຂອງລູກຄ້າ, ເຊັ່ນ: ຄວາມກວ້າງຂອງການຈັບ, ເລືອກເສັ້ນເລືອດຕັນໃນແລະຕົວກໍານົດການອື່ນໆ.
ຊິ້ນສ່ວນຢູ່ໃນກ່ອງສ້ອມ telescopic Hiygris HEGERLS ຊັ້ນຫຼາຍຊັ້ນລົດ shuttle car stereo warehouse ສ້ອມ telescopic ແມ່ນກົນໄກ telescopic ທີ່ໃຊ້ໃນສາງ stereo ແລະລະບົບການຂົນສົ່ງອັດຕະໂນມັດສໍາລັບການເກັບຮັກສາວັດສະດຸຫຼືການໂອນ. ມັນມີຫນ້າທີ່ຂະຫຍາຍອັດຕະໂນມັດສອງທາງທີ່ມີຄວາມຍືດຫຍຸ່ນແລະຫນ້າທີ່ຈໍາກັດທີ່ຖືກຕ້ອງ! ມັນສາມາດໄດ້ຮັບການຕິດຕັ້ງໂດຍກົງໃສ່ stacker, ຫຼື mounted ໃນກົນໄກການຍົກຄົງທີ່, ຫຼື mounted ໃນເວທີຍົກມືຖື. stacker ແລ່ນຜ່ານຖະຫນົນຫົນທາງລະຫວ່າງ shelves ເພື່ອເຂົ້າເຖິງຫຼືໂອນລາຍການອັດຕະໂນມັດ! ມັນສາມາດເຊື່ອມຕໍ່ກັບລະບົບສາຍການຜະລິດແລະລະບົບການຄຸ້ມຄອງວິສາຫະກິດ. ມັນນໍາໃຊ້ເຕັກໂນໂລຊີຄອມພິວເຕີແລະ barcode (ເຂົ້າລະຫັດ) ເພື່ອຮັບຮູ້ຂໍ້ມູນຂ່າວສານການຄຸ້ມຄອງອັດສະລິຍະແລະການດໍາເນີນງານ!

ກ່ຽວກັບ HEGERLS Clamping Telescopic Fork
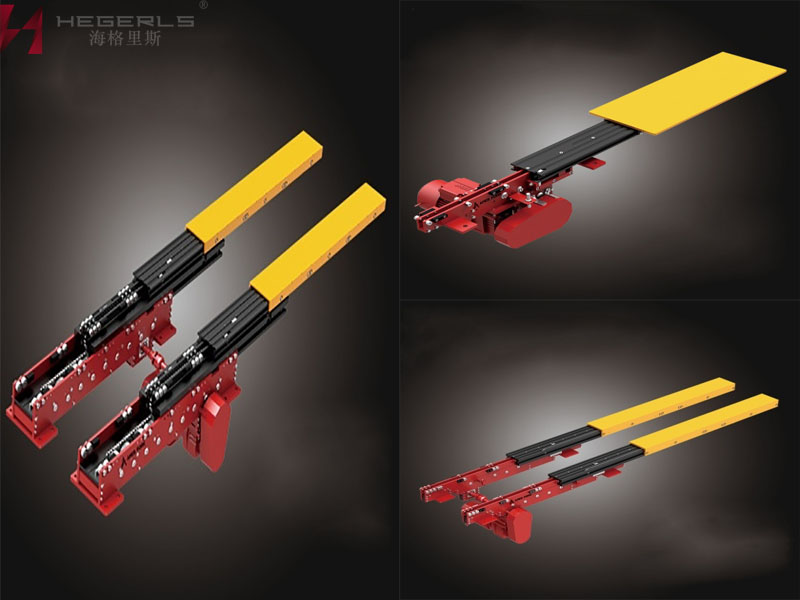
ສ້ອມ telescopic HEGERLS ແມ່ນເປັນ fork ທີ່ເປັນເອກະລັກໃນຊຸດຂອງສ້ອມ telescopic ຂອງ stackers, ຄື, ສ້ອມ telescopic ອັດຕະໂນມັດສອງທາງ, ຊຶ່ງເອີ້ນກັນວ່າ fork ຖື gripper ຫຼື fork ຈັບ, fork fork ຫຼື fork fork. . ມັນເປັນສ້ອມທີ່ນໍາໃຊ້ເປັນພິເສດສໍາລັບການຍົກຍ້າຍຂອງຖັງຂະຫນາດນ້ອຍ. ມັນສາມາດໄດ້ຮັບການປະກອບໂດຍກົງໃນຫຼາຍຊັ້ນເລືອກເອົາ AGV ຫຼືເວທີການເຮັດວຽກອື່ນໆ, ມີການຂະຫຍາຍຕົວຂອງແຂນສ້ອມແລະ clutch ຂອງ lever ໄດ້ (hook), ສໍາເລັດການເຂົ້າເຖິງຫຼືການໂອນການປະຕິບັດ!
HEGERLS gripper fork ສ່ວນຫຼາຍແມ່ນເຮັດດ້ວຍໂລຫະປະສົມອາລູມິນຽມ, ປະກອບດ້ວຍຂະຫນາດນ້ອຍ, ນ້ໍາຫນັກເບົາ, ຄວາມໄວແລ່ນໄວແລະການຂະຫຍາຍກ້ຽງ. ໃນເວລາດຽວກັນ, ມັນຍັງໄດ້ຮັບຮອງເອົາຫຼັກການຂອງການ synchronization ມໍເຕີຫຼາຍ, ຮູ້ວ່າກົນໄກການສ້ອມ telescopic ດຽວກັນສາມາດຖືກນໍາໃຊ້ເພື່ອໂອນຫຼືເຂົ້າເຖິງກ່ອງຂອງສະເພາະທີ່ແຕກຕ່າງກັນ. ມັນບໍ່ພຽງແຕ່ປັບປຸງປະສິດທິພາບການເກັບຮັກສາ, ແຕ່ຍັງຢ່າງຫຼວງຫຼາຍປັບປຸງອັດຕາການນໍາໃຊ້ພື້ນທີ່ຂອງການເກັບຮັກສາ, ໂດຍສະເພາະແມ່ນສໍາລັບການສູງ rise intensive warehousing!
ຄລິບ HEGERLS ກ່ຽວກັບໂຄງສ້າງຂອງສ້ອມ telescopic
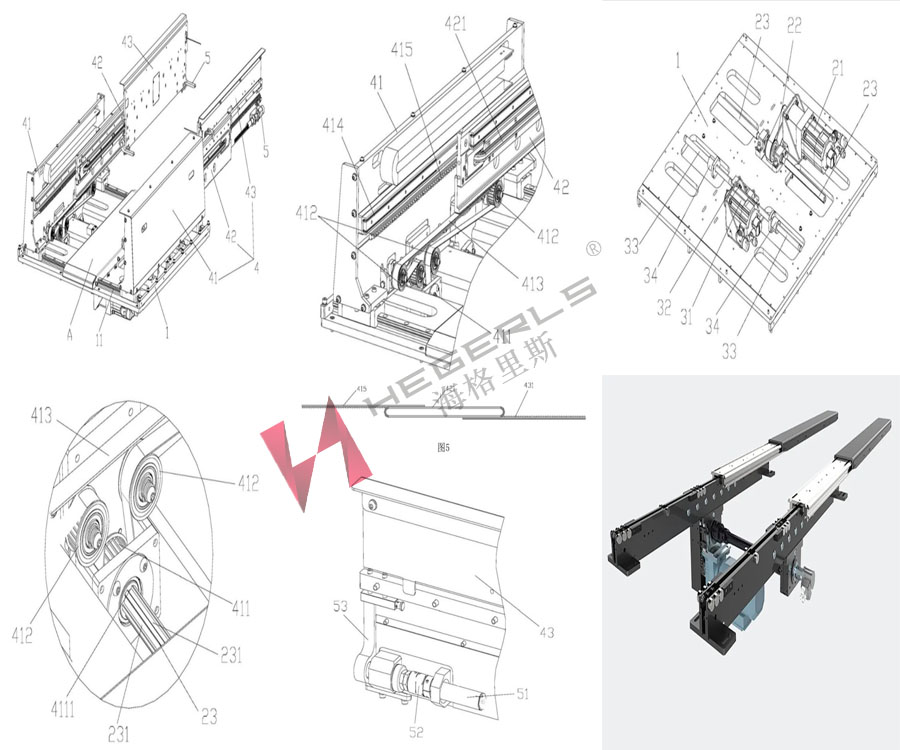
ໂຄງສ້າງຂອງ HEGERLS gripper fork ສາມາດແບ່ງອອກເປັນສະຖານທີ່ເກັບຮັກສາເລິກແລະສະຖານທີ່ເກັບຮັກສາຕື້ນ. ສະຖານທີ່ເກັບຮັກສາເລິກແມ່ນສະຖານທີ່ເກັບຮັກສາທີ່ມີສອງກ່ອງວັດສະດຸ, ແລະສະຖານທີ່ເກັບຮັກສາຕື້ນແມ່ນບ່ອນເກັບຮັກສາທີ່ມີກ່ອງວັດສະດຸຫນຶ່ງ. ນັ້ນແມ່ນ, ສະຖານທີ່ເກັບຮັກສາເລິກສາມາດຍຶດສອງກ່ອງວັດສະດຸໃນເວລາດຽວ, ໃນຂະນະທີ່ບ່ອນເກັບມ້ຽນຕື້ນສາມາດຍຶດເອົາກ່ອງວັດສະດຸຫນຶ່ງຄັ້ງຕໍ່ຄັ້ງ. ຄວາມແຕກຕ່າງລະຫວ່າງສ້ອມຂອງ HEGERLS ແລະສ້ອມ telescopic duplex ທໍາມະດາແມ່ນວ່າ fork ດຶງນິ້ວມືແມ່ນຍັງປະກອບດ້ວຍສາມສ້ອມ, ຄື, ສ້ອມພາຍໃນ, ສ້ອມກາງແລະ fork ພາຍນອກ, ຍົກເວັ້ນວ່າ fork ດ້ານຫນ້າ. ມີ rod ດຶງອີກຫນຶ່ງ (hook), ເຊິ່ງຖືກຈັບຄູ່ກັບ rail ຄູ່ມື (ລາງລົດໄຟເລື່ອນ), ແຖບ roller, ລໍ້ synchronous, ສາຍແອວ synchronous, ແຖບ fluent, rod shift (hook), jacking shaft, ແຖບລໍ້, motor drive (servo) , shift rod motor ເຄື່ອງມືກວດຫາແລະອົງປະກອບອື່ນໆປະກອບເປັນກົນໄກ telescopic ສົມບູນ, ເຊິ່ງຮ່ວມມືກັບແຂນ fork telescopic ແລະ clutch ຂອງ lever (hook) ສໍາເລັດການເຂົ້າເຖິງຫຼືການໂອນການປະຕິບັດ!
ຫຼັກການເຮັດວຽກຂອງ HEGERLS clip ກ່ຽວກັບສ້ອມ telescopic
ສ້ອມຂອງສ້ອມຂອງ HEGERLS ແມ່ນດ້ານຂ້າງແລະເຊື່ອມຕໍ່ທາງຂ້າງໂດຍທາງລົດໄຟຄູ່ມື. ໂດຍຜ່ານການຄວບຄຸມ, ລົດໄຟຄູ່ມືສາມາດເລື່ອນໄປຂ້າງຫນ້າເພື່ອປັບໄລຍະຫ່າງລະຫວ່າງສອງແຂນສ້ອມຂອງສ້ອມ, ເພື່ອບັນລຸການນໍາໃຊ້ທົ່ວໄປຂອງສ້ອມສໍາລັບກ່ອງວັດສະດຸຫຼາຍປະເພດ! ເມື່ອເກັບເອົາວັດສະດຸ, ສ້ອມຈະຂະຫຍາຍໄປເຖິງບ່ອນເກັບມ້ຽນວັດສະດຸ, ຮູຍຶດ ( lever) ຫຼຸດລົງໂດຍອັດຕະໂນມັດ ແລະ ກີດຂວາງດ້ານໜ້າຂອງກ່ອງ ຫຼື ກ່ອງພາດສະຕິກ, ແລະຫຼັງຈາກນັ້ນ ສ້ອມຈະດຶງ, ລາກກ່ອງກ່ອງ ຫຼື ກ່ອງພາດສະຕິກໃສ່ກາງ. ສ້ອມ, ແລະຫຼັງຈາກນັ້ນຍ້າຍອອກໄປໃນດ້ານກົງກັນຂ້າມຕາມຄວາມຕ້ອງການລະດັບ, hook (lever) ໄດ້ຖືກດຶງກັບຄືນໄປບ່ອນ, ແລະສ້ອມ retracts ອີກເທື່ອຫນຶ່ງເພື່ອເຮັດສໍາເລັດວຽກງານຂອງການເກັບຫຼືການໂອນ! ເຖິງແມ່ນວ່າຫຼັກການຂອງສ້ອມຂອງ gripper ແມ່ນຄືກັນກັບຂອງສ້ອມ telescopic ທໍາມະດາ, ພາກສ່ວນສາຍສົ່ງ, rods ເຊື່ອມຕໍ່ແລະອົງປະກອບອື່ນໆຂອງສ້ອມນິ້ວມືແມ່ນແຕກຕ່າງກັນຢ່າງຫຼວງຫຼາຍ. ມັນຖືກນໍາໃຊ້ເພື່ອອະທິບາຍວ່າລໍ້ຕ່ອງໂສ້, ລະບົບຕ່ອງໂສ້, ເກຍ, rack, ແລະອື່ນໆທັງຫມົດຖືກແທນທີ່ດ້ວຍລໍ້ synchronous, ສາຍແອວ synchronous, ແລະອື່ນໆ, ໃນຂະນະທີ່ແຂນເລື່ອນໄດ້ນໍາໃຊ້ rails ຄູ່ມື, ແລະວັດສະດຸຂອງສ້ອມແມ່ນທົດແທນດ້ວຍແຜ່ນໂລຫະ. ຫຼືວັດສະດຸໂລຫະປະສົມອາລູມິນຽມ, ດັ່ງນັ້ນນ້ໍາຫນັກຂອງສ້ອມ gripper ແມ່ນມີພຽງແຕ່ປະມານ 80kg.
ນອກຈາກນັ້ນ, ຄວນສັງເກດວ່າໃນລະຫວ່າງການອອກແບບຂອງສ້ອມ telescopic ປະເພດ gripper, ຂະຫນາດຂອງຊັ້ນວາງເກັບຮັກສາທີ່ຫນາແຫນ້ນ, ຕໍາແຫນ່ງແນວຕັ້ງຂອງຊັ້ນວາງທີ່ມີກ່ອງ, ລະດັບຕິດຕາມແລະຂະຫນາດຂອງກ່ອງຄວນຖືກລວມເຂົ້າກັນເພື່ອກໍານົດ. ຕົວກໍານົດການໂດຍລວມຂອງສ້ອມຂະຫຍາຍ (ການເຄື່ອນໄຫວຂອງສ້ອມຂະຫຍາຍ, ຊ່ອງຫວ່າງກ່ອງ, ຄວາມກວ້າງຂອງສ້ອມ, ຄວາມກວ້າງຂອງສ້ອມ, ຄວາມສູງຂອງສ້ອມ, ແລະອື່ນໆ), ເພື່ອຕອບສະຫນອງຄວາມຕ້ອງການຂອງບັນຈຸຢູ່ໃນ shelves ໄດ້. Clamping fork ພຽງແຕ່ສາມາດໂອນຫຼືເຂົ້າເຖິງຜະລິດຕະພັນທີ່ຫຸ້ມຫໍ່ຢູ່ໃນ cartons ຫຼືກ່ອງພາດສະຕິກປະສິດທິຜົນ, ແລະບໍ່ສາມາດໂອນວັດສະດຸທີ່ບໍ່ສະຫມໍ່າສະເຫມີ. ນອກຈາກນັ້ນ, ປະລິມານແລະນ້ໍາຫນັກຂອງກ່ອງວັດສະດຸທີ່ຖືກໂອນຄວນຈະບໍ່ໃຫຍ່ເກີນໄປ, ແລະນ້ໍາຫນັກການໂຫຼດບໍ່ຄວນເກີນ 100KG! ຄວາມສູງຂອງສ້ອມ clamping ໂດຍທົ່ວໄປແມ່ນອອກແບບຕາມຄວາມສູງຂອງຖັງ!
ກ່ຽວກັບ HEGERLS Clip on Shuttle
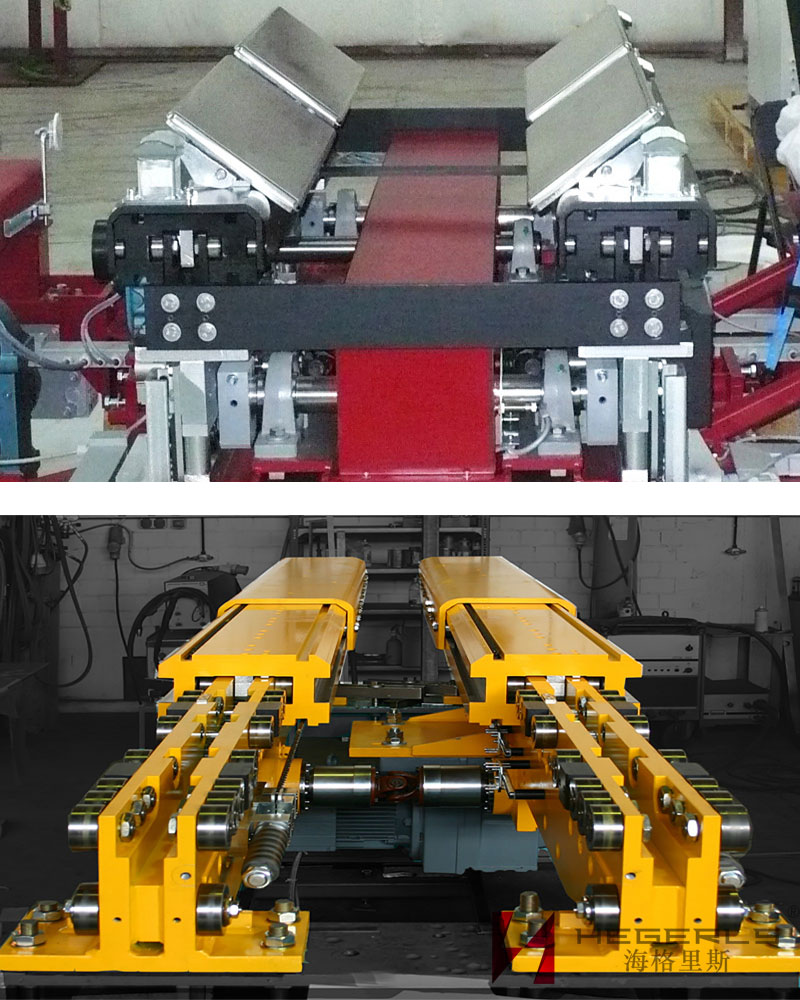
ໂຄງສ້າງຂອງ HEGERLS clip ສຸດ shuttle ປະກອບດ້ວຍກອບ shuttle, chassis shuttle, ກົນໄກການເດີນທາງ, ກົນໄກການຂະຫຍາຍຂອງສ້ອມຮອງ, ເກັບ, ແຜ່ນ bearing ແລະເວທີ bearing. ໂຄງປະກອບການດັ່ງຕໍ່ໄປນີ້:
ກອບ shuttle ໃດມັກຈະເປັນຢູ່ຕາມໂກນປິດປະກອບດ້ວຍວົງເລັບຕົ້ນຕໍທັງສອງດ້ານ, ຫອຍແລະວົງເລັບ hub ພາຍໃນ, ແລະຈັດລຽງຕາມລໍາດັບຢູ່ໃນທັງສອງສົ້ນຂອງ chassis shuttle; ແກະໄດ້ຖືກສະຫນອງໃຫ້ມີຝາເທິງທີ່ສາມາດເປີດແລະປິດໂດຍຜ່ານ hinge ປະຕູ turnover; rack ສາຍກະດານຖືກຈັດລຽງຢູ່ເທິງວົງເລັບ hub; ກົນໄກການເດີນທາງປະກອບດ້ວຍລໍ້ຂັບເຄື່ອນ, ລໍ້ passive, motor DC brushless, ການຫຼຸດຜ່ອນແລະ shaft ການເຊື່ອມຕໍ່; ທັງສອງດ້ານຂອງກອບ shuttle ຢູ່ໃນສົ້ນຫນຶ່ງຂອງ chassis shuttle ແມ່ນສະຫນອງໃຫ້ມີລໍ້ຂັບລົດເຊື່ອມຕໍ່ໂດຍ shafts ເຊື່ອມຕໍ່, ແລະທັງສອງດ້ານຂອງກອບ shuttle ໃນຕອນທ້າຍຂອງ chassis shuttle ແມ່ນສະຫນອງໃຫ້ມີລໍ້ passive ເຊື່ອມຕໍ່ໂດຍ shafts ເຊື່ອມຕໍ່; ມໍເຕີ DC brushless ຮ່ວມມືກັບຕົວຫຼຸດຜ່ອນເພື່ອຂັບລໍ້ຂັບລົດແລະຂັບລົດຕົວຕັ້ງຕົວຕີ; shaft ເຊື່ອມຕໍ່ແມ່ນສະຫນອງໃຫ້ກັບຕົວເຂົ້າລະຫັດສະນະແມ່ເຫຼັກ, ໂດຍຜ່ານທີ່ຕໍາແຫນ່ງເລີ່ມຕົ້ນແລະຢຸດຂອງ shuttle ສຸດເສັ້ນທາງຊື່ແມ່ນໄດ້ຮັບ; A ກົນໄກການຂະຫຍາຍຂອງສ້ອມຮອງແມ່ນຈັດລຽງ symmetrically ຢູ່ດ້ານໃນຂອງກອບລົດ shuttle; chassis shuttle ລະຫວ່າງກົນໄກການຂະຫຍາຍ fork ມັດທະຍົມແມ່ນສະຫນອງໃຫ້ກັບເວທີທີ່ຮັບຜິດຊອບສໍາລັບການວາງກະຕ່າສິນຄ້າ; ຢູ່ຕາມໂກນປິດຂອງກອບລົດຮັບສົ່ງແມ່ນໃຫ້ຕາມລໍາດັບດ້ວຍແຜ່ນແບກ, ເຊິ່ງແຜ່ນຂັບລົດ, ແຜ່ນຄວບຄຸມຕົ້ນຕໍຂອງກົນໄກການເດີນທາງແລະແຜ່ນຄວບຄຸມຕົ້ນຕໍຂອງກົນໄກການຂະຫຍາຍຂອງສ້ອມຖືກຈັດລຽງຕາມລໍາດັບ; ແຜ່ນຂັບລົດຂັບກົນໄກການເດີນທາງເພື່ອຂັບລົດ shuttle ແລ່ນໃນເສັ້ນທາງຊື່. ກະດານຄວບຄຸມຕົ້ນຕໍຂອງກົນໄກການເດີນທາງຄວບຄຸມຕົວກໍານົດການແລ່ນແລະເລີ່ມຕົ້ນຕໍາແຫນ່ງຢຸດຂອງລົດຮັບສົ່ງ, ແລະກະດານຄວບຄຸມຕົ້ນຕໍຂອງກົນໄກການຂະຫຍາຍ fork ຄວບຄຸມກົນໄກການຂະຫຍາຍສ້ອມຮອງເພື່ອ grab ແລະວາງກະຕ່າໃສ່ shelf ໄດ້; ອຸປະກອນເກັບລວບລວມແມ່ນຕັ້ງໄວ້ລະຫວ່າງລົດຮັບສົ່ງແລະທາງກົງ, ເຊິ່ງເຊື່ອມຕໍ່ກັບສາຍໄຟຟ້າທີ່ຈັດຢູ່ໃນເສັ້ນທາງຊື່ແລະໃຊ້ເພື່ອສະຫນອງພະລັງງານສໍາລັບລົດ shuttle. ຄຸນນະສົມບັດໂຄງສ້າງຂອງ clip ໃນລົດ shuttle ອັດສະລິຍະສໍາລັບການເກັບຮັກສາຍັງຢູ່ໃນ grooves ໄດ້ຖືກຕັ້ງຢູ່ໃນຕໍາແຫນ່ງທີ່ລໍ້ຂັບລົດແລະລໍ້ passive ຕາມລໍາດັບຕິດຕໍ່ກັບ shaft ເຊື່ອມຕໍ່, ແລະວົງ retainer elastic ໄດ້ຖືກຕັ້ງຢູ່ໃນຮ່ອງເພື່ອສ້າງເປັນແກນ. ການຈັດຕໍາແຫນ່ງຂອງລໍ້ຂັບລົດແລະລໍ້ passive. ລໍ້ຄູ່ມືຄູ່ຖືກຕັ້ງໄວ້ຕາມລໍາດັບຢູ່ດ້ານຂ້າງຂອງຕົວເຄື່ອງລົດຮັບສົ່ງພາຍໃຕ້ລໍ້ຂັບລົດແລະລໍ້ຕົວຕັ້ງຕົວຕີ, ແລະລະຫວ່າງທາງກົງແລະຕົວຖັງລົດຮັບສົ່ງ. ລໍ້ຄູ່ມືຄູ່ປະກອບເປັນຂໍ້ຈໍາກັດດ້ານຊ້າຍແລະຂວາໃນເວລາທີ່ລໍ້ຂັບລົດແລະລໍ້ passive ແລ່ນຢູ່ໃນເສັ້ນທາງຊື່. ກົນໄກການຂະຫຍາຍຂອງສ້ອມຂັ້ນສອງປະກອບມີ: ແຜ່ນຍູ້ການຂະຫຍາຍສ້ອມລະດັບທໍາອິດ, ແຜ່ນຂະຫຍາຍສ້ອມລະດັບທີສອງ, ກົນໄກການຂະຫຍາຍຂອງສ້ອມລະດັບທີສອງ, ກົນໄກການຂະຫຍາຍຂອງສ້ອມລະດັບທີສອງ, ມໍເຕີຂະຫຍາຍສ້ອມ, ເຄື່ອງຫຼຸດຜ່ອນອື່ນ, ແລະ shaft ຂັບ. ; ດ້ານນອກຂອງວົງເລັບ hub ຂອງກອບລົດ shuttle ໄດ້ຖືກສະຫນອງໃຫ້ມີແຜ່ນຍູ້ການຂະຫຍາຍ fork ຂັ້ນຕອນທໍາອິດ; A chute ຮູບ U ແມ່ນ ຈັດ ຢູ່ ເຄິ່ງ ກາງ ຂອງ ແຜ່ນ ສ້ອມ ຍູ້ ຂັ້ນ ຕອນ ທໍາ ອິດ, ແລະ pulleys ຮູບ U ເປັນ ຫຼາຍ ແມ່ນ ຈັດ ຢູ່ ໃນ ໄລ ຍະ ເທົ່າ ທຽມ ກັນ ໃນ chute ຮູບ U; ແຜ່ນສ້ອມຮອງຖືກຈັດລຽງຢູ່ນອກແຜ່ນຮອງຮູບຕົວ U; ແຜ່ນສ້ອມຮອງແມ່ນເຊື່ອມຕໍ່ດ້ວຍຮູຮູຮູບ U ຫຼາຍຮູຜ່ານ bolts ແລະແກ່ນ; ປາຍເທິງຂອງແຜ່ນຂະຫຍາຍສ້ອມຂັ້ນຕອນທີສອງແມ່ນໃຫ້ຕາມລໍາດັບດ້ວຍສ້ອມປ່ຽນ, ມໍເຕີຫຼຸດລົງດາວເຄາະ DC ແລະເຊັນເຊີ photoelectric ຈາກພາຍນອກໄປຫາພາຍໃນ; ເຊັນເຊີ photoelectric ຖືກນໍາໃຊ້ເພື່ອໃຫ້ໄດ້ສັນຍານຕໍາແຫນ່ງຂອງສ້ອມແລະສົ່ງໄປທີ່ກະດານຄວບຄຸມຕົ້ນຕໍຂອງກົນໄກການຂະຫຍາຍຂອງສ້ອມ, ເຊິ່ງຄວບຄຸມ motor DC planetary reducer ເພື່ອຂັບລົດສ້ອມເພື່ອຍ້າຍອອກຕາມລວງນອນຫຼືຕັ້ງ; ກົນໄກການດຶງແບບ synchronous ທີສອງຖືກຈັດລຽງຕາມລໍາດັບຢູ່ເທິງແຜ່ນຍູ້ fork ຕົ້ນຕໍແລະໂດຍກົງຂ້າງລຸ່ມນີ້ແລະຂ້າງເທິງ chute ຮູບ U; ກົນໄກການ pulley synchronous ທີສອງແມ່ນເຊື່ອມຕໍ່ກັບແຜ່ນກົດສາຍແອວ synchronous ເທິງແຜ່ນຂະຫຍາຍສ້ອມຮອງ; ມໍເຕີການຂະຫຍາຍສ້ອມ ແລະຕົວຫຼຸດອີກອັນໜຶ່ງ ຂັບກົນໄກການຂະຫຍາຍສ້ອມຂອງສ້ອມຂັ້ນສອງໃຫ້ເຄື່ອນທີ່, ແລະຂັບກົນໄກການຂະຫຍາຍສ້ອມຂອງສ້ອມຂັ້ນສອງຢູ່ອີກດ້ານໜຶ່ງເພື່ອເຄື່ອນຜ່ານເພົາຂັບ, ເພື່ອໃຫ້ແຜ່ນຍູ້ສ່ວນຂະຫຍາຍຂອງສ້ອມຂັ້ນສອງເຄື່ອນທີ່ ແລະ ຂັບເຄື່ອນຕົວຮອງ. ກົນໄກ synchronous pulley ທີ່ຈະຍ້າຍອອກ, ດັ່ງນັ້ນການຂັບລົດແຜ່ນຂະຫຍາຍສ້ອມຮອງເພື່ອຍ້າຍ. ກົນໄກການສົ່ງຕໍ່ຂອງສ້ອມສອງຂັ້ນຕອນປະກອບດ້ວຍຕົວເຂົ້າລະຫັດແມ່ເຫຼັກ, ສາຍແອວ synchronous pulley I, ສາຍແອວ synchronous I, ອຸປະກອນລໍ້ tensioning ແລະ rack; ສາຍຮັດເຂັມຂັດເວລາ 1 ແລະສາຍແອວຈັບເວລາ 1 ຖືກຈັດລຽງຢູ່ລຸ່ມແຜ່ນຍູ້ຂອງສ້ອມຂັ້ນທຳອິດ; ຂ້າງຫນຶ່ງຂອງສາຍແອວ synchronous pulley I ແມ່ນເຊື່ອມຕໍ່ກັບ shaft ສົ່ງ, ແລະອີກດ້ານຫນຶ່ງແມ່ນເຊື່ອມຕໍ່ກັບ shaft ຜົນຜະລິດຂອງ reducer ອື່ນໆໂດຍຜ່ານ keyway ໄດ້. ອຸປະກອນລໍ້ tensioner ຖືກກໍານົດຕາມລໍາດັບທັງສອງດ້ານຂອງ reducer ອື່ນໆສໍາລັບການສ້ອມແຊມການຊ່ວຍເຫຼືອຂອງສາຍແອວ synchronous pulley I ແລະສາຍແອວ synchronous I; rack ແມ່ນຈັດລຽງລະຫວ່າງແຜ່ນຍູ້ຂອງສ້ອມຂັ້ນຕອນທໍາອິດແລະສາຍແອວ synchronous; ມໍເຕີການຂະຫຍາຍຂອງສ້ອມແລະຕົວຫຼຸດລົງອີກອັນຫນຶ່ງເຮັດໃຫ້ສາຍແອວ synchronous pulley I ແລະສາຍແອວ synchronous I ເພື່ອຫມຸນ, ແລະຂັບສາຍແອວ synchronous pulley II ແລະສາຍແອວ synchronous II ໃນອີກດ້ານຫນຶ່ງເພື່ອ rotate ຜ່ານ shaft ລະບົບສາຍສົ່ງ. ໃນເວລາດຽວກັນ, racks ທັງສອງດ້ານໄດ້ຂັບລົດແຜ່ນຍູ້ການຂະຫຍາຍ fork ຕົ້ນຕໍທີ່ສອດຄ້ອງກັນເພື່ອບັນລຸການຂະຫຍາຍສ້ອມຕົ້ນຕໍ. ໃນເວລາທີ່ກົນໄກການດຶງສາຍແອວ synchronous ທີສອງເຄື່ອນທີ່ synchronously ແລະຂັບແຜ່ນການຂະຫຍາຍສ້ອມຂອງຮອງໃຫ້ເຄື່ອນທີ່, pulley ຮູບ U ເປັນມ້ວນຢູ່ໃນ chute ຮູບ U, ເຮັດໃຫ້ແຜ່ນຂະຫຍາຍສ້ອມຮອງຮັບຮູ້ການຂະຫຍາຍສ້ອມຮອງ. ອຸປະກອນລໍ້ tensioning ປະກອບມີ: bolt, ວົງເລັບປັບ, ຫມາກແຫ້ງເປືອກແຂງ double ແລະລໍ້ tensioning; A ລໍ້ tensioning ແມ່ນຈັດຢູ່ຂ້າງລຸ່ມຂອງສາຍແອວ synchronous I ແລະທັງສອງດ້ານຂອງ reducer ອື່ນໆ, ແລະຖືກສ້ອມແຊມໃນວົງເລັບຕົ້ນຕໍໂດຍຜ່ານຫມາກແຫ້ງເປືອກແຂງສອງ; ວົງເລັບປັບຖືກຈັດລຽງຢູ່ພາຍໃຕ້ nut double ຜ່ານ bolt, ແລະຕໍາແຫນ່ງຂອງວົງເລັບປັບໄດ້ຖືກປັບໂດຍ bolt, ດັ່ງນັ້ນວົງເລັບປັບໄດ້ຂັບ nut ສອງເພື່ອຍ້າຍຂຶ້ນແລະລົງ, ດັ່ງນັ້ນສາຍແອວ synchronous ຂ້າພະເຈົ້າສາມາດຮັກສາໄດ້. ລັດຄວາມກົດດັນພາຍໃຕ້ການປະຕິບັດຂອງລໍ້ tensioning.
ລົດເມຮັບສົ່ງ HEGERLS ຈະໄດ້ຮັບຜົນປະໂຫຍດວິສາຫະກິດແນວໃດ?
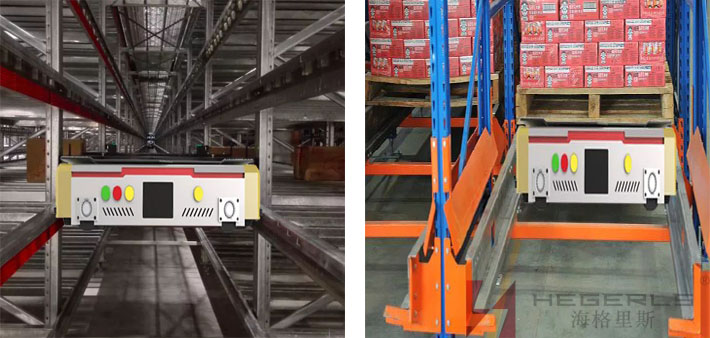
ຫນ້າທໍາອິດ, ກົນໄກການເດີນທາງ, ກົນໄກການຂະຫຍາຍຂອງສ້ອມແລະກອບ, sliding contact line ແລະອຸປະກອນການເກັບພະລັງງານຂອງລົດ shuttle ອັດສະລິຍະ HEGERLS ທີ່ມີ clip on storage ແມ່ນຈັດຢ່າງສົມເຫດສົມຜົນ, ເຊິ່ງເຮັດໃຫ້ການນໍາໃຊ້ຢ່າງເຕັມທີ່ຂອງພື້ນທີ່ຂອງລົດ shuttle, ແລະສາມາດປັບຕົວເຂົ້າກັບ. ການເກັບຮັກສາອັດຕະໂນມັດແລະການດຶງເອົາສິນຄ້າຂອງສະເພາະທີ່ແຕກຕ່າງກັນແລະສະຖານທີ່ຢູ່ໃນສາງສາມມິຕິລະດັບ, ຂະຫຍາຍການປົກຫຸ້ມຂອງຄໍາຮ້ອງສະຫມັກຂອງລົດ shuttle ໄດ້, ແລະຢ່າງວ່ອງໄວແລະປະສິດທິຜົນສໍາເລັດການປະຕິບັດຢ່າງຕໍ່ເນື່ອງຂອງລົດ shuttle, ເຊັ່ນ: ການຍ່າງ, ການຂະຫຍາຍສ້ອມ, ເກັບ. ຂຶ້ນແລະຈັດວາງສິນຄ້າ, ມັນໄດ້ຮັບຮູ້ການເກັບຮັກສາສິນຄ້າຢ່າງວ່ອງໄວແລະຖືກຕ້ອງ, ສະນັ້ນການປັບປຸງຢ່າງໃຫຍ່ຫຼວງປະສິດທິພາບການດໍາເນີນງານແລະລະດັບເຕັກໂນໂລຊີຂອງສາງອັດຕະໂນມັດ, ແລະຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍການລົງທຶນຂອງວິສາຫະກິດ. ໃນເວລາດຽວກັນ, ມັນງ່າຍດາຍແລະແສງສະຫວ່າງໃນໂຄງສ້າງ, ຄວາມຫນ້າເຊື່ອຖືສູງ, ແລະງ່າຍຕໍ່ການຮັກສາ. ມັນສາມາດທົດແທນ stacker ຖະຫນົນແບບດັ້ງເດີມ, realizing ຄວາມຍືດຫຍຸ່ນຂອງລະບົບ, ແລະສອດຄ່ອງກັບແນວໂນ້ມການພັດທະນາຂອງ e-commerce logistics ແລະ warehousing ອັດຕະໂນມັດ.
ອັນທີສອງ, ໃນກົນໄກການເດີນທາງຂອງລົດຮັບສົ່ງອັດສະລິຍະ HEGERLS, ທໍ່ເຊື່ອມຕໍ່ຂອງລໍ້ຂັບລົດແລະລໍ້ຕົວຕັ້ງຕົວຕີແມ່ນສະຫນອງໃຫ້ມີຮ່ອງ, ແລະພາກສ່ວນເຊື່ອມຕໍ່ຂອງລູກປືນແມ່ນເຊື່ອມຕໍ່ດ້ວຍວົງແຫວນ elastic retainer ຊະນິດໃຫມ່, ຮັບຮູ້ຜົນກະທົບຂອງຕໍາແຫນ່ງແກນຂອງການເຊື່ອມຕໍ່. shafts; ໂດຍການນໍາໃຊ້ວົງແຫວນ elastic retainer ເພື່ອບັນລຸຜົນກະທົບການຈັດຕໍາແຫນ່ງຕາມແກນ, ປະສິດທິພາບການຜະລິດສາມາດເພີ່ມຂຶ້ນແລະຄ່າໃຊ້ຈ່າຍສາມາດປະຫຍັດໄດ້.
ອັນທີສາມ: ລົດຮັບສົ່ງອັດສະລິຍະ Higelis HEGERLS ສໍາລັບການຖືການເກັບຮັກສາຮັບຮູ້ວ່າລໍ້ຂັບລົດແລະລໍ້ passive ສະເຫມີເຄື່ອນໄປຕາມເສັ້ນທາງຊື່ໂດຍບໍ່ມີການ deviating ຈາກການຕິດຕາມໂດຍຜ່ານໂຄງສ້າງລໍ້ຄູ່ທິດທາງ. ໂຄງສ້າງຕໍາແຫນ່ງນີ້ແມ່ນມີຄວາມຫມັ້ນຄົງແລະເຊື່ອຖືໄດ້.
ສີ່, ໂຄງປະກອບການຂະຫຍາຍສ້ອມຮອງທີ່ຮັບຮອງເອົາໂດຍລົດຮັບສົ່ງອັດສະລິຍະ HEGERLS ສາມາດເຮັດໃຫ້ໄລຍະຫ່າງຂອງສ້ອມໄດ້ໄກກວ່າແລະໄດ້ຮັບກະຕ່າຫຼາຍຂື້ນຢູ່ໃນຕໍາແຫນ່ງທີ່ແຕກຕ່າງກັນ; ໃນເວລາດຽວກັນ, ຫຼັກການຂອງກົນໄກການຂະຫຍາຍຂອງສ້ອມຂັ້ນສອງແມ່ນງ່າຍດາຍ, ແລະຄ່າໃຊ້ຈ່າຍໃນການອອກແບບແລະການຜະລິດແມ່ນຕໍ່າ; ພາກສ່ວນລະບົບສາຍສົ່ງໄດ້ຮັບຮອງເອົາໂຫມດຂອງມໍເຕີດຽວ + ຕົວຫຼຸດ + ເພົາລະບົບສາຍສົ່ງເພື່ອເຮັດໃຫ້ກົນໄກການຂະຫຍາຍຂອງສ້ອມຂັ້ນສອງສາມາດບັນລຸຈຸດປະສົງຂອງການຂະຫຍາຍແລະການຫົດຕົວຂອງ synchronous, ເຊິ່ງປະຫຍັດຄ່າໃຊ້ຈ່າຍຫຼາຍ, ຫຼຸດຜ່ອນພື້ນທີ່ຈັດວາງທີ່ຕ້ອງການ, ແລະຫຼຸດຜ່ອນນ້ໍາຫນັກຂອງລົດຮັບສົ່ງ. .
ອັນທີຫ້າ, ລົດຮັບສົ່ງອັດສະລິຍະ Higelis HEGERLS ນຳໃຊ້ອຸປະກອນລໍ້ຍູ້ແຮງດັນປະເພດໃໝ່, ເຊິ່ງສາມາດເຮັດໃຫ້ສາຍແອວ synchronous ເຄັ່ງຕຶງ ແລະຮັບຮູ້ການເຮັດວຽກປົກກະຕິຂອງລົດຮັບສົ່ງ. ຍິ່ງໄປກວ່ານັ້ນ, ອຸປະກອນລໍ້ tensioning ນີ້ແມ່ນງ່າຍດາຍທີ່ຈະເຮັດ, ສະດວກໃນການຕິດຕັ້ງແລະສາມາດປັບໄດ້ໄວ, ເຊິ່ງປະຫຍັດຄ່າໃຊ້ຈ່າຍ, ປະຫຍັດພື້ນທີ່ແລະປັບປຸງປະສິດທິພາບການເຮັດວຽກ.
ເວລາປະກາດ: 19-12-2022