



ສາງສາມມິຕິແບບອັດຕະໂນມັດແມ່ນສ່ວນຫນຶ່ງທີ່ສໍາຄັນຂອງການຂົນສົ່ງ. ມັນມີຄວາມໄດ້ປຽບຫຼາຍເຊັ່ນການປະຫຍັດທີ່ດິນ, ຫຼຸດຜ່ອນຄວາມເຂັ້ມຂົ້ນຂອງແຮງງານ, ການລົບລ້າງຄວາມຜິດພາດ, ການປັບປຸງລະດັບຂອງລະບົບອັດຕະໂນມັດແລະການຄຸ້ມຄອງສາງ, ການປັບປຸງຄຸນນະພາບຂອງການຄຸ້ມຄອງແລະຜູ້ປະກອບການ, ຫຼຸດຜ່ອນການສູນເສຍການເກັບຮັກສາແລະການຂົນສົ່ງ, ຫຼຸດຜ່ອນການ backlog ຂອງທຶນເຮັດວຽກ, ແລະການປັບປຸງການຂົນສົ່ງ. ປະສິດທິພາບ, ໃນຂະນະດຽວກັນ, ສາງສາມມິຕິລະດັບອັດຕະໂນມັດທີ່ເຊື່ອມຕໍ່ກັບລະບົບຂໍ້ມູນຂ່າວສານການຄຸ້ມຄອງຄອມພິວເຕີລະດັບໂຮງງານແລະເຊື່ອມຕໍ່ຢ່າງໃກ້ຊິດກັບສາຍການຜະລິດແມ່ນການເຊື່ອມໂຍງທີ່ສໍາຄັນຂອງ CIMS (ລະບົບການຜະລິດປະສົມປະສານຄອມພິວເຕີ) ແລະ FMS (ລະບົບການຜະລິດທີ່ມີຄວາມຍືດຫຍຸ່ນ). ມັນຍັງເປັນລະບົບທີ່ອັດຕະໂນມັດການເກັບຮັກສາແລະການຂົນສົ່ງໂດຍບໍ່ມີການແຊກແຊງຄູ່ມືໂດຍກົງ. ເປັນຜະລິດຕະພັນເຕັກໂນໂລຊີສູງຂອງການພັດທະນາຂອງສັງຄົມອຸດສາຫະກໍາທັນສະໄຫມ, ແລະວິສາຫະກິດຍົກສູງຄຸນນະພາບການຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍມີບົດບາດສໍາຄັນ.
ໃນຊຸມປີມໍ່ໆມານີ້, ດ້ວຍການປັບປຸງການຜະລິດ ແລະ ຄຸ້ມຄອງວິສາຫະກິດຢ່າງບໍ່ຢຸດຢັ້ງ, ມີວິສາຫະກິດນັບມື້ນັບໄດ້ຮັບຮູ້ວ່າ, ການປັບປຸງ ແລະ ສົມເຫດສົມຜົນຂອງລະບົບຂົນສົ່ງແມ່ນມີຄວາມສຳຄັນຫຼາຍຕໍ່ການພັດທະນາຂອງວິສາຫະກິດ. stacker ແມ່ນອຸປະກອນຍົກແລະ stacking ທີ່ສໍາຄັນທີ່ສຸດໃນສາງສາມມິຕິລະດັບອັດຕະໂນມັດ. ມັນສາມາດຂົນສົ່ງສິນຄ້າຈາກບ່ອນຫນຶ່ງໄປຫາບ່ອນອື່ນໂດຍຜ່ານການດໍາເນີນງານຄູ່ມື, ການດໍາເນີນງານເຄິ່ງອັດຕະໂນມັດຫຼືອັດຕະໂນມັດເຕັມຮູບແບບ. ມັນສາມາດ shuttle ກັບຄືນໄປບ່ອນໃນຊ່ອງທາງສາມມິຕິລະດັບອັດຕະໂນມັດແລະເກັບສິນຄ້າຢູ່ທີ່ທາງເຂົ້າລ້ານຊ້າງເຂົ້າໄປໃນຫ້ອງບັນທຸກ; ຫຼືໃນທາງກົງກັນຂ້າມ, ເອົາສິນຄ້າຢູ່ໃນຫ້ອງບັນທຸກສິນຄ້າອອກແລະຂົນສົ່ງພວກເຂົາໄປສູ່ເສັ້ນທາງຂ້າມເລນ, ນັ້ນແມ່ນ, stacker ແມ່ນລົດໄຟຫຼື trolley ທີ່ບໍ່ມີທາງຍ່າງທີ່ມີອຸປະກອນຍົກ. stacker ໄດ້ຖືກຕິດຕັ້ງດ້ວຍມໍເຕີເພື່ອຂັບ stacker ຍ້າຍແລະຍົກ pallet ໄດ້. ເມື່ອ stacker ຊອກຫາພື້ນທີ່ສິນຄ້າທີ່ຕ້ອງການ, ມັນສາມາດຍູ້ຫຼືດຶງຊິ້ນສ່ວນຫຼືກ່ອງສິນຄ້າເຂົ້າໄປໃນຫຼືອອກຈາກ rack ໂດຍອັດຕະໂນມັດ. stacker ມີເຊັນເຊີເພື່ອກວດຫາການເຄື່ອນໄຫວອອກຕາມລວງນອນຫຼືຄວາມສູງຍົກເພື່ອກໍານົດຕໍາແຫນ່ງແລະຄວາມສູງຂອງພື້ນທີ່ຂົນສົ່ງສິນຄ້າ, ບາງຄັ້ງທ່ານຍັງສາມາດອ່ານຊື່ຂອງພາກສ່ວນໃນພາຊະນະແລະຂໍ້ມູນພາກສ່ວນອື່ນໆທີ່ກ່ຽວຂ້ອງ.
ດ້ວຍການພັດທະນາເທກໂນໂລຍີການຄວບຄຸມຄອມພິວເຕີແລະສາງສາມມິຕິອັດຕະໂນມັດ, ຄໍາຮ້ອງສະຫມັກຂອງ stacker ແມ່ນມີຫຼາຍຂຶ້ນ, ການປະຕິບັດດ້ານວິຊາການແມ່ນດີຂຶ້ນແລະດີກວ່າ, ແລະຄວາມສູງກໍ່ເພີ່ມຂຶ້ນ. ມາຮອດປະຈຸ, ຄວາມສູງຂອງ stacker ສາມາດບັນລຸ 40m. ໃນຄວາມເປັນຈິງ, ຖ້າມັນບໍ່ໄດ້ຖືກຈໍາກັດໂດຍການກໍ່ສ້າງສາງແລະຄ່າໃຊ້ຈ່າຍ, ຄວາມສູງຂອງ stacker ສາມາດບໍ່ຈໍາກັດ. ຄວາມໄວການເຮັດວຽກຂອງ stacker ແມ່ນຍັງປັບປຸງຢ່າງຕໍ່ເນື່ອງ. ໃນປັດຈຸບັນ, ຄວາມໄວການດໍາເນີນງານຕາມລວງນອນຂອງ stacker ແມ່ນສູງເຖິງ 200m / min ( stacker ທີ່ມີການໂຫຼດຂະຫນາດນ້ອຍໄດ້ບັນລຸ 300m / min), ຄວາມໄວຍົກແມ່ນສູງເຖິງ 120m / min, ແລະຄວາມໄວ telescopic ຂອງສ້ອມແມ່ນສູງເຖິງ 50m. / ນທ.
ອົງປະກອບຂອງ stacker
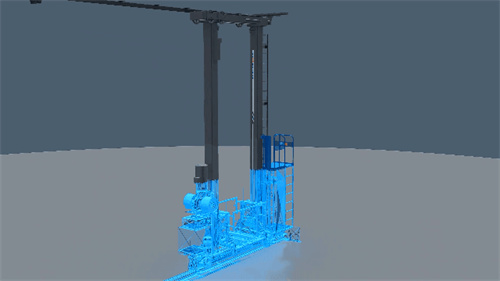
stacker ແມ່ນປະກອບດ້ວຍກອບ ( beam ເທິງ, beam ຕ່ໍາແລະຖັນ), ກົນໄກການເດີນທາງອອກຕາມລວງນອນ, ກົນໄກການຍົກ, ເວທີການຂົນສົ່ງ, ສ້ອມແລະລະບົບການຄວບຄຸມໄຟຟ້າ. ລາຍລະອຽດມີດັ່ງນີ້:
ກອບ
ກອບເປັນກອບຮູບສີ່ຫລ່ຽມປະກອບດ້ວຍ beam ເທິງ, ຖັນຊ້າຍແລະຂວາແລະ beam ຕ່ໍາ, ເຊິ່ງສ່ວນໃຫຍ່ແມ່ນໃຊ້ສໍາລັບການ bearing. ເພື່ອຄວາມສະດວກໃນການຕິດຕັ້ງຊິ້ນສ່ວນແລະການຫຼຸດຜ່ອນນ້ໍາຫນັກຂອງ stacker, beams ເທິງແລະຕ່ໍາແມ່ນເຮັດດ້ວຍເຫຼັກຊ່ອງ, ແລະຖັນແມ່ນເຮັດດ້ວຍເຫຼັກມົນທົນ. ໄມ້ກາງແຂນທາງເທິງແມ່ນສະໜອງໃຫ້ດ້ວຍຕົວຍຶດລົດໄຟທ້ອງຟ້າ ແລະ buffer, ແລະທາງຂວາງທາງລຸ່ມແມ່ນສະໜອງໃຫ້ດ້ວຍຕົວຍຶດລົດໄຟໃຕ້ດິນ.
ກົນໄກການດໍາເນີນງານ
ກົນໄກການແລ່ນແມ່ນກົນໄກການຂັບລົດຂອງການເຄື່ອນໄຫວຕາມລວງນອນຂອງ stacker, ເຊິ່ງໂດຍທົ່ວໄປແມ່ນປະກອບດ້ວຍມໍເຕີ, ຄູ່, ຫ້າມລໍ້, ຫຼຸດຜ່ອນແລະລໍ້ເດີນທາງ. ມັນສາມາດແບ່ງອອກເປັນປະເພດແລ່ນດິນ, ປະເພດແລ່ນເທິງແລະປະເພດແລ່ນກາງຕາມຕໍາແຫນ່ງທີ່ແຕກຕ່າງກັນຂອງກົນໄກການແລ່ນ. ໃນເວລາທີ່ປະເພດແລ່ນຫນ້າດິນໄດ້ຖືກຮັບຮອງເອົາ, ສີ່ລໍ້ແມ່ນຈໍາເປັນທີ່ຈະແລ່ນໄປຕາມ monorail ທີ່ຕັ້ງຢູ່ເທິງຫນ້າດິນ. ດ້ານເທິງຂອງ stacker ໄດ້ຖືກນໍາພາໂດຍສອງຊຸດຂອງລໍ້ລວງນອນຕາມ I-beam ຄົງຢູ່ໃນ beam ເທິງ. beam ເທິງແມ່ນເຊື່ອມຕໍ່ກັບ bolts ແລະຖັນ, ແລະ beam ຕ່ໍາແມ່ນ welded ກັບຊ່ອງເຫຼັກແລະແຜ່ນເຫຼັກ. ກົນໄກການຂັບເຄື່ອນ, ລໍ້ມໍເຕີຂອງແມ່ບົດສໍາລອງ, ຕູ້ໄຟຟ້າ, ແລະອື່ນໆແມ່ນຕິດຕັ້ງທັງຫມົດ. ທັງສອງດ້ານຂອງ beam ຕ່ໍາຍັງມີການຕິດຕັ້ງ buffers ເພື່ອປ້ອງກັນບໍ່ໃຫ້ stacker ການຜະລິດຜົນບັງຄັບໃຊ້ collision ຂະຫນາດໃຫຍ່ເນື່ອງຈາກອອກຈາກການຄວບຄຸມທັງສອງສົ້ນຂອງອຸໂມງ. ຖ້າ stacker ຕ້ອງການເອົາເສັ້ນໂຄ້ງ, ການປັບປຸງບາງຢ່າງສາມາດເຮັດໄດ້ກັບທາງລົດໄຟຄູ່ມື.
ກົນໄກການຍົກ
ກົນໄກການຍົກແມ່ນກົນໄກທີ່ເຮັດໃຫ້ເວທີຂົນສົ່ງສິນຄ້າເຄື່ອນຍ້າຍໃນແນວຕັ້ງ. ໂດຍທົ່ວໄປແລ້ວມັນປະກອບດ້ວຍມໍເຕີ, ເບກ, ເຄື່ອງຫຼຸດຜ່ອນ, drum ຫຼືລໍ້ແລະພາກສ່ວນທີ່ມີຄວາມຍືດຫຍຸ່ນ. ພາກສ່ວນທີ່ມີຄວາມຍືດຫຍຸ່ນທີ່ໃຊ້ທົ່ວໄປປະກອບມີເຊືອກສາຍເຫຼັກແລະລະບົບຕ່ອງໂສ້ຍົກ. ນອກເໜືອໄປຈາກຕົວຫຼຸດເກຍທົ່ວໄປແລ້ວ, ຕົວຫຼຸດເກຍ worm ແລະເຄື່ອງຫຼຸດດາວເຄາະກໍ່ຖືກໃຊ້ເນື່ອງຈາກຕ້ອງການຄວາມໄວໃນອັດຕາສ່ວນຫຼາຍ. ອຸປະກອນສາຍສົ່ງລະບົບຕ່ອງໂສ້ຍົກສ່ວນຫຼາຍແມ່ນຕິດຕັ້ງຢູ່ສ່ວນເທິງ ແລະມັກຈະມີເຄື່ອງຕ້ານນ້ຳໜັກເພື່ອຫຼຸດກຳລັງການຍົກ. ເພື່ອເຮັດໃຫ້ກົນໄກການຍົກມີຄວາມຫນາແຫນ້ນ, ມໍເຕີທີ່ມີເບກມັກຈະຖືກນໍາໃຊ້. ລະບົບຕ່ອງໂສ້ໄດ້ຖືກເຊື່ອມຕໍ່ fixedly ກັບ pallet ຜ່ານເຄື່ອງມືກ່ຽວກັບຖັນ. ອົງປະກອບສະຫນັບສະຫນູນການຍົກແນວຕັ້ງແມ່ນຖັນ. ຖັນແມ່ນໂຄງສ້າງກ່ອງທີ່ມີການບິດເບືອນຕົ້ນຕໍ, ແລະທາງລົດໄຟຄູ່ມືໄດ້ຖືກຕິດຕັ້ງຢູ່ທັງສອງດ້ານຂອງຖັນ. ຖັນຍັງມີອຸປະກອນທີ່ມີສະຫຼັບຕໍາແຫນ່ງຈໍາກັດເທິງແລະຕ່ໍາແລະອົງປະກອບອື່ນໆ.
ສ້ອມ
ມັນສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍເຄື່ອງຫຼຸດຜ່ອນມໍເຕີ, sprocket, ອຸປະກອນເຊື່ອມຕໍ່ລະບົບຕ່ອງໂສ້, ແຜ່ນສ້ອມ, ລົດໄຟຄູ່ມືທີ່ສາມາດເຄື່ອນຍ້າຍໄດ້, ລາງລົດໄຟຄູ່ມືຄົງທີ່, ລູກປືນ roller ແລະອຸປະກອນການຈັດຕໍາແຫນ່ງບາງຢ່າງ. ກົນໄກການສ້ອມແມ່ນກົນໄກບໍລິຫານສໍາລັບ stacker ໃນການເຂົ້າເຖິງສິນຄ້າ. ມັນໄດ້ຖືກຕິດຕັ້ງຢູ່ໃນ pallet ຂອງ stacker ແລະສາມາດຂະຫຍາຍອອກຕາມລວງນອນແລະ retracted ເພື່ອທີ່ຈະສົ່ງຫຼືເອົາສິນຄ້າອອກໄປທັງສອງດ້ານຂອງຕາຂ່າຍໄຟຟ້າ. ໂດຍທົ່ວໄປແລ້ວ, ສ້ອມຖືກແບ່ງອອກເປັນ fork ສ້ອມດ່ຽວ, ສ້ອມສອງເທົ່າ ຫຼື fork fork ຫຼາຍອີງຕາມຈໍານວນຂອງສ້ອມ, ແລະ fork fork ຫຼາຍແມ່ນຖືກນໍາໃຊ້ສໍາລັບການ stacking ສິນຄ້າພິເສດ. ສ້ອມແມ່ນສ່ວນຫຼາຍແມ່ນສ້ອມ telescopic ທີ່ແຕກຕ່າງກັນສາມຂັ້ນຕອນ, ເຊິ່ງປະກອບດ້ວຍສ້ອມເທິງ, ສ້ອມກາງ, ສ້ອມຕ່ໍາແລະລູກກິ້ງເຂັມທີ່ມີຫນ້າທີ່ນໍາພາ, ເພື່ອຫຼຸດຜ່ອນຄວາມກວ້າງຂອງເສັ້ນທາງແລະເຮັດໃຫ້ມັນມີການເດີນທາງ telescopic ພຽງພໍ. ສ້ອມສາມາດແບ່ງອອກເປັນສອງປະເພດຕາມໂຄງສ້າງຂອງມັນ: ຮູບແບບ rack ເກຍແລະໂຫມດລະບົບຕ່ອງໂສ້ sprocket. ຫຼັກການ telescoping ຂອງສ້ອມແມ່ນວ່າ fork ຕ່ໍາໄດ້ຖືກຕິດຕັ້ງຢູ່ໃນ pallet, fork ກາງແມ່ນຂັບເຄື່ອນໂດຍແຖບເກຍຫຼືແຖບ sprocket ເພື່ອຍ້າຍຊ້າຍຫຼືຂວາຈາກຈຸດສຸມຂອງສ້ອມຕ່ໍາປະມານເຄິ່ງຫນຶ່ງຂອງຄວາມຍາວຂອງຕົນເອງ, ແລະ. ຄວາມສ້ອມດ້ານເທິງຂະຫຍາຍໄປທາງຊ້າຍຫຼືຂວາຈາກຈຸດກາງຂອງສ້ອມກາງໂດຍຄວາມຍາວເລັກນ້ອຍກວ່າເຄິ່ງຫນຶ່ງຂອງຄວາມຍາວຂອງຕົນເອງ. ສ້ອມເທິງແມ່ນຂັບເຄື່ອນດ້ວຍຕ່ອງໂສ້ roller ສອງຫຼືເຊືອກສາຍ. ສົ້ນຫນຶ່ງຂອງຕ່ອງໂສ້ຫຼືເຊືອກສາຍແມ່ນຖືກສ້ອມແຊມກັບສ້ອມຕ່ໍາຫຼື pallet, ແລະປາຍອື່ນໆແມ່ນສ້ອມແຊມກັບສ້ອມເທິງ.
ກົນໄກການຍົກແລະ pallet
ກົນໄກການຍົກແມ່ນສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍມໍເຕີຍົກ (ລວມທັງການຫຼຸດຜ່ອນ), sprocket ຂັບ, ລະບົບຕ່ອງໂສ້ຂັບ, sprocket ສອງ, ລະບົບຕ່ອງໂສ້ຍົກແລະ idler sprocket. ລະບົບຕ່ອງໂສ້ການຍົກແມ່ນລະບົບຕ່ອງໂສ້ roller ແຖວສອງຊັ້ນທີ່ມີປັດໃຈຄວາມປອດໄພຫຼາຍກ່ວາ 5. ມັນປະກອບເປັນໂຄງສ້າງທີ່ປິດດ້ວຍ sprocket idler ໃນ pallet ແລະ beams ເທິງແລະຕ່ໍາ. ເມື່ອມໍເຕີຍົກເຮັດໃຫ້ລໍ້ຕ່ອງໂສ້ສອງລໍ້ຫມຸນຜ່ານລະບົບຕ່ອງໂສ້ຂັບ, ລະບົບຕ່ອງໂສ້ການຍົກຈະເຄື່ອນທີ່, ດັ່ງນັ້ນຈຶ່ງເຮັດໃຫ້ເວທີຍົກ (ລວມທັງສ້ອມແລະສິນຄ້າ) ເພີ່ມຂຶ້ນແລະຫຼຸດລົງ. ມໍເຕີຍົກແມ່ນຄວບຄຸມໂດຍການປ່ຽນຄວາມຖີ່ PLC ເພື່ອຫຼີກເວັ້ນການຄວາມກົດດັນຫຼາຍເກີນໄປກ່ຽວກັບລະບົບຕ່ອງໂສ້ການຍົກໃນຕອນຕົ້ນຂອງການຍົກແລະຢຸດ. ແພລະຕະຟອມຂົນສົ່ງສິນຄ້າສ່ວນໃຫຍ່ແມ່ນເຮັດດ້ວຍຮາບພຽງຜ່ານແລະແຜ່ນເຫຼັກເຊື່ອມ, ເຊິ່ງສ່ວນໃຫຍ່ແມ່ນໃຊ້ໃນການຕິດຕັ້ງສ້ອມແລະອຸປະກອນປ້ອງກັນຄວາມປອດໄພບາງຢ່າງ. ເພື່ອຮັບປະກັນການເຄື່ອນໄຫວຂຶ້ນແລະລົງທີ່ຫມັ້ນຄົງຂອງ pallet, 4 ລໍ້ຄູ່ມືແລະ 2 ລໍ້ດ້ານເທິງຕາມຖັນແມ່ນຕິດຕັ້ງຢູ່ແຕ່ລະດ້ານຂອງ pallet.
ອຸປະກອນໄຟຟ້າແລະການຄວບຄຸມ
ມັນສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍໄດໄຟຟ້າ, ການສົ່ງສັນຍານແລະການຄວບຄຸມ stacker. stacker adopts sliding ສາຍຕິດຕໍ່ສໍາລັບການສະຫນອງພະລັງງານ; ນັບຕັ້ງແຕ່ການສະຫນອງພະລັງງານ sliding contact ສາຍຕິດຕໍ່ສື່ສານແມ່ນງ່າຍທີ່ຈະຖືກແຊກແຊງໂດຍ clutter ພະລັງງານ, ຮູບແບບການສື່ສານ infrared ຕ້ານການແຊກແຊງທີ່ດີໄດ້ຖືກຮັບຮອງເອົາເພື່ອແລກປ່ຽນຂໍ້ມູນຂ່າວສານກັບຄອມພິວເຕີແລະອຸປະກອນສາງອື່ນໆ. ລັກສະນະການດໍາເນີນງານຂອງ stacker ແມ່ນວ່າມັນຕ້ອງໄດ້ຮັບການຈັດວາງແລະແກ້ໄຂຢ່າງຖືກຕ້ອງ, ຖ້າບໍ່ດັ່ງນັ້ນມັນຈະເອົາສິນຄ້າທີ່ບໍ່ຖືກຕ້ອງ, ທໍາລາຍສິນຄ້າແລະຊັ້ນວາງ, ແລະທໍາລາຍ stacker ຕົວຂອງມັນເອງໃນກໍລະນີທີ່ຮ້າຍແຮງ. ການຄວບຄຸມຕໍາແຫນ່ງຂອງ stacker ຮັບຮອງເອົາວິທີການຮັບຮູ້ທີ່ຢູ່ຢ່າງແທ້ຈິງ, ແລະຕົວຊອກຫາໄລຍະເລເຊີຖືກນໍາໃຊ້ເພື່ອກໍານົດຕໍາແຫນ່ງປະຈຸບັນຂອງ stacker ໂດຍການວັດແທກໄລຍະຫ່າງຈາກ stacker ກັບຈຸດພື້ນຖານແລະການປຽບທຽບຂໍ້ມູນທີ່ເກັບໄວ້ໃນ PLC ລ່ວງຫນ້າ. ຄ່າໃຊ້ຈ່າຍແມ່ນສູງ, ແຕ່ຄວາມຫນ້າເຊື່ອຖືແມ່ນສູງ.
ອຸປະກອນປ້ອງກັນຄວາມປອດໄພ
Stacker ແມ່ນປະເພດຂອງເຄື່ອງຈັກຍົກ, ເຊິ່ງຈໍາເປັນຕ້ອງແລ່ນດ້ວຍຄວາມໄວສູງໃນອຸໂມງທີ່ສູງແລະແຄບ. ເພື່ອຮັບປະກັນຄວາມປອດໄພຂອງບຸກຄະລາກອນແລະອຸປະກອນ, stacker ຕ້ອງໄດ້ຮັບການຕິດຕັ້ງອຸປະກອນປ້ອງກັນຄວາມປອດໄພຂອງຮາດແວແລະຊອບແວທີ່ສົມບູນ, ແລະຊຸດຂອງ interlocking ແລະມາດຕະການປ້ອງກັນຈະຖືກປະຕິບັດໃນການຄວບຄຸມໄຟຟ້າ. ອຸປະກອນປ້ອງກັນຄວາມປອດໄພຕົ້ນຕໍປະກອບມີການປ້ອງກັນການຈໍາກັດຢູ່ປາຍຍອດ, ການປ້ອງກັນ interlock, ການຄວບຄຸມການກວດພົບຕໍາແຫນ່ງໃນທາງບວກ, ການປ້ອງກັນການທໍາລາຍເຊືອກເວທີ, ການປ້ອງກັນການປິດໄຟ, ແລະອື່ນໆ.

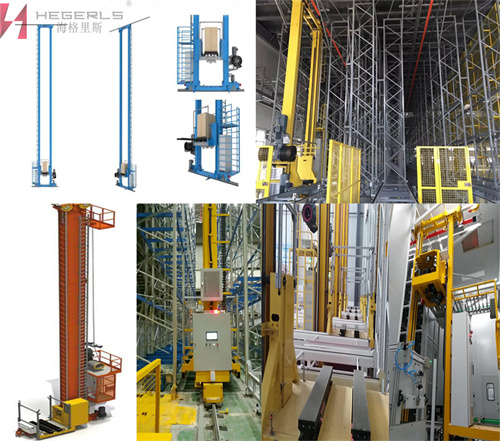
ການກໍານົດຮູບແບບຂອງ stacker: ມີຮູບແບບຕ່າງໆຂອງ stacker, ລວມທັງ stacker tunnel monorail, double rail tunnel stacker, stacker tunnel rotary, stacker ຖັນດຽວ, stacker ຖັນຄູ່, ແລະອື່ນໆ.
ການກໍານົດຄວາມໄວຂອງ stacker: ອີງຕາມຄວາມຕ້ອງການຂອງການໄຫຼເຂົ້າຂອງສາງ, ຄິດໄລ່ຄວາມໄວອອກຕາມລວງນອນ, ຄວາມໄວຍົກແລະຄວາມໄວສ້ອມຂອງ stacker ໄດ້.
ຕົວກໍານົດການແລະການຕັ້ງຄ່າອື່ນໆ: ຮູບແບບການຈັດຕໍາແຫນ່ງແລະຮູບແບບການສື່ສານຂອງ stacker ໄດ້ຖືກຄັດເລືອກຕາມເງື່ອນໄຂສະຖານທີ່ຂອງສາງແລະຄວາມຕ້ອງການຂອງຜູ້ໃຊ້. ການຕັ້ງຄ່າຂອງ stacker ສາມາດສູງຫຼືຕ່ໍາ, ຂຶ້ນກັບສະຖານະການສະເພາະ.

ການນໍາໃຊ້ເຄື່ອງ stacker ສາງສາມມິຕິອັດຕະໂນມັດ
* ເອົາໃຈໃສ່ໃນການຮັກສາຄະນະກໍາມະການທໍາຄວາມສະອາດແລະທໍາຄວາມສະອາດ, ແລະທໍາຄວາມສະອາດຂີ້ຝຸ່ນ, ນ້ໍາມັນແລະຂອງອື່ນໆທຸກໆມື້.
* ເນື່ອງຈາກຫນ້າຈໍສໍາຜັດແລະອົງປະກອບໄຟຟ້າອື່ນໆໃນແຜງປະຕິບັດງານຖືກທໍາລາຍໄດ້ງ່າຍຍ້ອນຄວາມຊຸ່ມຊື່ນ, ກະລຸນາຮັກສາຄວາມສະອາດ.
* ເມື່ອທໍາຄວາມສະອາດແຜງປະຕິບັດງານ, ແນະນໍາໃຫ້ໃຊ້ຜ້າປຽກເຊັດ, ແລະເອົາໃຈໃສ່ບໍ່ໃຫ້ໃຊ້ສານທໍາຄວາມສະອາດທີ່ມີ corrosive ເຊັ່ນ: ນໍ້າມັນ.
* ເມື່ອຍ້າຍ AGV, ໄດຕ້ອງຖືກຍົກຂຶ້ນກ່ອນ. ເມື່ອຂັບລົ້ມເຫລວໃນການຍົກດ້ວຍເຫດຜົນບາງຢ່າງ, ໄຟຟ້າ AGV ຕ້ອງຖືກປິດ. ມັນຖືກຫ້າມຢ່າງເຂັ້ມງວດທີ່ຈະຍ້າຍ AGV ເມື່ອໄດເປີດແລະໄດບໍ່ຖືກຍົກ.
* ເມື່ອ AGV ຕ້ອງການຢຸດສຸກເສີນ, ປຸ່ມສຸກເສີນຈະຖືກໃຊ້. ມັນຖືກຫ້າມບໍ່ໃຫ້ໃຊ້ການລາກຫຼືວິທີການແຊກແຊງອື່ນໆເພື່ອບັງຄັບໃຫ້ AGV trolley ຢຸດ.
* ມັນຖືກຫ້າມບໍ່ໃຫ້ໃສ່ສິ່ງໃດໃນກະດານປະຕິບັດງານ.
ບໍາລຸງຮັກສາປະຈໍາວັນຂອງ stacker ສາງສາມມິຕິອັດຕະໂນມັດ
* ອະນາໄມຂອງຂັວນ ຫຼືສິ່ງຂອງຕ່າງຊາດໃນລົດຕິດ ແລະ ຖະໜົນຫົນທາງ.
*ກວດເບິ່ງວ່າມີການຮົ່ວໄຫລຂອງນ້ໍາມັນຢູ່ທີ່ຂັບ, hoist ແລະສ້ອມ.
* ກວດສອບຕໍາແຫນ່ງຕັ້ງຂອງສາຍ.
*ກວດສອບການສວມໃສ່ຂອງລາງລົດໄຟນໍາພາແລະລໍ້ນໍາພາຢູ່ໃນຖັນ.
* ເຮັດຄວາມສະອາດຕາແສງເອເລັກໂຕຣນິກ / ເຊັນເຊີທີ່ຕິດຕັ້ງຢູ່ໃນ stacker.
* ການທົດສອບການທໍາງານຂອງຕາ optical ເອເລັກໂຕຣນິກ / ເຊັນເຊີຕິດຕັ້ງໃນ stacker ໄດ້.
* ກວດສອບການຂັບລົດແລະການດໍາເນີນງານຂອງລໍ້ (ໃສ່).
* ກວດເບິ່ງອຸປະກອນເສີມແລະກວດເບິ່ງວ່າລໍ້ສະຫນັບສະຫນູນເສຍຫາຍ.
* ກວດເບິ່ງວ່າບໍ່ມີຮອຍແຕກຢູ່ໃນຕໍາແຫນ່ງເຊື່ອມຂອງການເຊື່ອມຕໍ່ຄໍລໍາແລະສາຍປະຕູ.
* ກວດເບິ່ງຕໍາແຫນ່ງອອກຕາມລວງນອນຂອງສາຍແອວ toothed.
* ກວດສອບການເຄື່ອນໄຫວ stacker.
* ກວດກາເບິ່ງວຽກງານສີຂອງ stacker ໄດ້.

ດ້ວຍການພັດທະນາການຜະລິດອຸດສາຫະກໍາທີ່ທັນສະໄຫມ, ໃນສາງສາມມິຕິ, ຄໍາຮ້ອງສະຫມັກຂອງ stacker ຈະກວ້າງຂວາງ, ສ່ວນໃຫຍ່ແມ່ນໃຊ້ໃນການຜະລິດເຄື່ອງຈັກ, ການຜະລິດລົດໃຫຍ່, ອຸດສາຫະກໍາແຜ່ນແພ, ລົດໄຟ, ຢາສູບ, ການແພດແລະອຸດສາຫະກໍາອື່ນໆ, ເພາະວ່າອຸດສາຫະກໍາເຫຼົ່ານີ້ຈະເປັນ. ເຫມາະສໍາລັບການນໍາໃຊ້ສາງອັດຕະໂນມັດສໍາລັບການເກັບຮັກສາ. Hagerls ເປັນວິສາຫະກິດທີ່ສົມບູນແບບທີ່ສຸມໃສ່ການແກ້ໄຂ, ການອອກແບບ, ການຜະລິດແລະການຕິດຕັ້ງການບໍລິການສາງອັດສະລິຍະແລະການຂົນສົ່ງອັດສະລິຍະສະຫນັບສະຫນູນອຸປະກອນອັດຕະໂນມັດ. ມັນສາມາດສະຫນອງລູກຄ້າດ້ວຍ stacker ຖັນດຽວ, stacker ຖັນ double, stacker ປ່ຽນເປັນສີ, double extension stacker ແລະ bin stacker ແລະອຸປະກອນປະເພດອື່ນໆ. ມັນສາມາດປັບແຕ່ງອຸປະກອນ stacker ປະເພດຕ່າງໆຕາມຜະລິດຕະພັນຕ່າງໆ, ບໍ່ວ່າຈະເປັນຂະຫນາດແລະນ້ໍາຫນັກ.
ເວລາປະກາດ: ສິງຫາ-18-2022